

実用化に向けて、未来のクルマが走り始めています。

アジア最大級の最先端 IT・エレクトロニクス総合展「CEATEC JAPAN 2013」にて、「米国メディアパネル・イノベーションアワード2013」グランプリ、および「特別賞Smart Mobility」を受賞している。
自動車事故の低減はもちろんのこと、高齢者や障がい者へのモビリティの提供など、さまざまな観点から自動運転技術の開発を進め、2020年までの実用化を目指すことを発表した。日産リーフをベースとする車両には、レーザースキャナーやカメラなどのセンサーと、先進的な人工知能を搭載。車両周囲360°を認識するセンサーと、そのデータを適切に判断する人工知能という2つのキーテクノロジーにより、対向車や歩行者など周囲の交通状況を確認しながら、自動で交差点を通過することができる。また、高速道路走行時には、素早く周囲の状況を把握・判断することで、自動で走行レーンの維持や変更のほか、障害物の回避も可能になる。
この自動運転技術は、「クルマには自身で周囲の状況を判断するために必要な装備がすべて搭載され、外部からの情報だけに頼らず、クルマ自身が周囲の状況を判断する」というコンセプトのもとに開発されている。そして、これはクルマが人を「危険に近づけない」、つまりクルマが人を守るという、日産の高度で積極的な安全の考え方「セーフティ・シールド※」の延長上にある。
この最先端技術を公道でテストすることによって、改善につながるデータを集積。2020年の実用化に向けて開発がさらに推し進められていく。さらに2020年以降は、より幅広い車種に自動運転技術を搭載していくことを目標としている。将来、さまざまな日産車に、自動運転技術が搭載される日がやってくる。

※通常の運転から衝突事故までを「危険が顕在化していない」から、「衝突後」までの6段階に分類。
それぞれの状態において発生する危険要因に対して最適な技術(バリア)を機能させ、より危険な状態に進むことを防止するという考え方。
ついにここまできた、安全につながる次世代の技術とは。
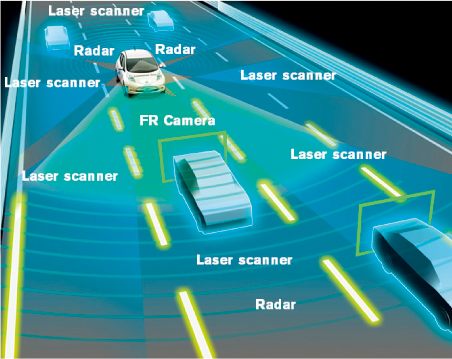
高速道路走行
一般道と比較すると高速道路ではクルマのスピードが速いため、わずかなミスが重大事故につながる。素早く正確な認識、判断、操作が必要となるが、そのためより遠くを認識するセンサーによって前方や周囲を認識。それをもとに車線合流や車線変更、さらには障害物を検知した場合は緊急回避や停止も自動で行う。
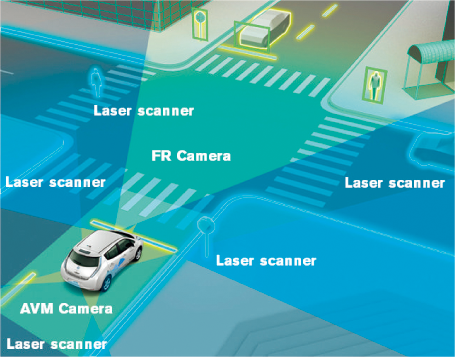
市街地走行
信号や交通標識のほか、横断しようとする歩行者や左右を横切るクルマなど、市街地のなかでも交差点では周囲の状況が刻々と変化する。そのため数多くの情報をさまざまなセンサーを用いることで認識し、車載コンピューターで判断。モーターやステアリング、ブレーキなどを制御し、自動で交差点を通過する。

ワンウェイ型大規模カーシェアリング「チョイモビ ヨコハマ」がスタート
日産と横浜市が考えた超小型モビリティによるユニークなカーシェアリングが「チョイモビ ヨコハマ」だ。入会金・年会費無料の会員登録を行い、安全運転講習会に参加して会員カードを取得すれば、横浜市各所のステーションに置かれた2人乗り超小型EV「日産ニューモビリティコンセプト」を利用することができる。利用料金は1分ごとに20円。事前に登録したクレジットカードでスマートに決済。借りた地点以外のステーションでも返却できるワンウェイ型サービスという点も特徴となっている。
実施期間は2013年10月11日から約1年間。日産ニューモビリティコンセプトは、現在50台導入され、今後も増やされる予定。超小型EVが秘める新しいモビリティ実現の可能性を実際に感じてください。

スクーターのようなタンデム乗車で、2人で乗ることができる。
リチウムイオン電池を搭載し、
最高速度は80km/h。

安全運転講習を受講すると発行される会員カード。利用後は予約した降車ステーションに返却するワンウェイ型サービスで利便性を追求した。
※「チョイモビ ヨコハマ」は2015年9月30日をもって第2期実証実験の運用を終了いたしました。
※本記事は2014年7月22日時点の情報を元に作成されております。